Щит с ЧПУ v3 гравировальный станок Плата расширения 3D принтер A4988 драйвер платы
384 руб.
Описание
Описание продукта:
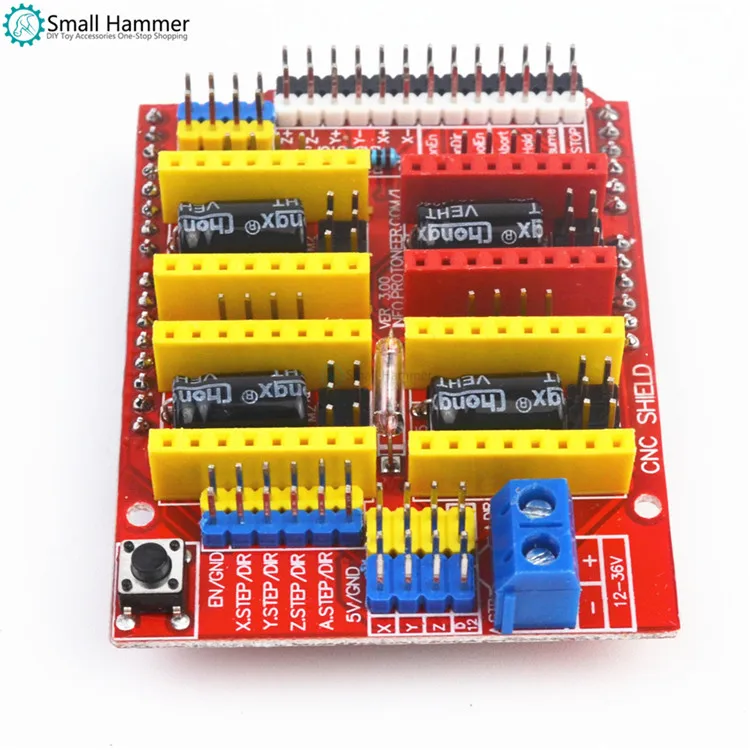
Плата расширения может использоваться в качестве платы расширения привода для гравировальных машин, 3D принтеров и т. д. есть в общей сложности 4 шага шаговый двигатель привода в модульном слоте для (обратите внимание на то, что плата не включает в себя стоимость A4988 шаговый двигатель привода Модуль), который может управлять 4-ех каналах. В соответствии с мотором, и каждый шаговый двигатель для получения точного результата нужно всего лишь 2 IO порты, а это означает, что 6 IO порты Может управлять 3 шаговые двигатели очень хорошо, что очень удобно в использовании, И это громоздко, чтобы попрощаться с традиционным шаговым двигателем.
Введение соответствия между UNO и портом IO модуля:
Основной контроль шагового двигателя требует контактов. Другие булавки используются в гравировальной машине или 3d-принтере. Мы не будем их здесь объяснять. IO соответствует Приведенному выше рисунку.
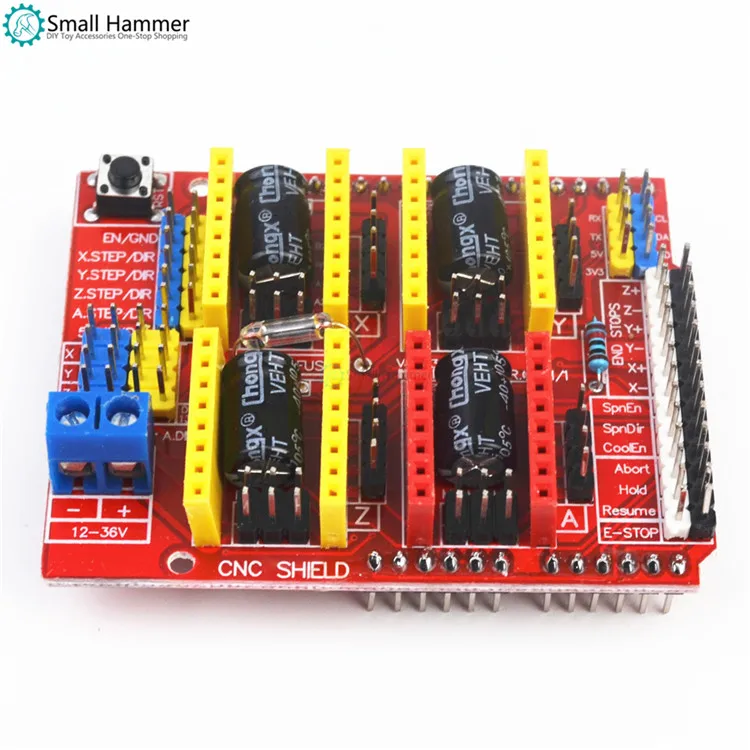
Arduino UNO -------------------- Плата расширения
8 ----------------------- EN (шаговый привод, активный низкий)
7 -------------------- Z. DIR (контроль направления оси Z)
6 --------------------- Y. DIR (контроль направления оси Y)
5 ---------------------- X. DIR (контроль направления оси X)
4 ------------------- Z. шаг (Ступенчатый контроль Z-axis)
3 -------------------- Y. шаг (шаговый контроль оси Y)
2 -------------------- X. шаг (Ступенчатый контроль оси X)
/Ниже представлена простая программа управления шаговым двигателем.
# Определить EN 8/шаговый двигатель включить, активный низкий
# Define X_DIR 5/X-axis шаговый двигатель управление направления
# Определить Y_DIR 6/y оси шагового двигателя управление направления
# Определить Z_DIR 7/z оси шагового двигателя управление направления
# Определите X_STP 2/Ступенчатый контроль оси x
# Определите Y_STP 3/Ступенчатый контроль оси y
# Определить Z_STP 4/z оси Ступенчатый контроль
/*
/Функция: функция шага: Контролируйте направление шагового двигателя, количество шагов.
/Параметр: контроль направления dir, dirPin соответствует штырьку DIR шагового двигателя, ступенчатый штырь соответствует шаговому штифту шагового двигателя, количество шагов
/Не возвращаемое значение
*/
Шаг Void (boolean dir, byte dirPin, byte stepperPin, int steps)
Шаг (false, X_DIR, X_STP, 200);/двигатель X-axis реверсирует 1 поворот, 200 шагов для круга
Шаг (false, Y_DIR, Y_STP, 200);/двигатель y-axis Реверсивный 1 поворот, 200 шагов для одного поворота
Шаг (false, Z_DIR, Z_STP, 200);/z-осевой двигатель реверсивно 1 поворот, 200 шагов для одного поворота
Задержка (1000);
Шаг (true, X_DIR, X_STP, 200);/двигатель оси X вращается 1 поворот, 200 шагов-круг
Шаг (true, Y_DIR, Y_STP, 200);/двигатель оси y вращается один поворот, 200 шагов для одного поворота
Шаг (true, Z_DIR, Z_STP, 200);/двигатель z-axis вращается один поворот, 200 шагов для одного поворота
Задержка (1000);
} Долл. США
Экспериментальная явлений:
Шаговый двигатель реверсирует одну революцию, паузы в течение 1 секунды, а затем проходит круг, и так далее.
Стоит отметить, что при включении в A4988 модуль, пожалуйста, будьте осторожны, чтобы не включить его.
Метод проводки шагового двигателя:
2A, 2B-это группа (красный, зеленый), 1A, 1B-это группа (синий, желтый), которые хотят изменить направление, изменить положение одной группы, такой как 2A, обмен с 2B.